Система оперативной блокировки разъединителей (ОБР) подстанций 35-110 кВ
на базе контроллерова ICPDAS LP-8821, LP-8781, iPAC-8841 или Advantech APAX
Управление электромагнитной блокировкой заключается в управлении подачей питания ± 220 В на электромагнитные замки (ЭМЗ) приводов разъединителей и их заземляющих ножей в зависимости от определенного положения выключателей, разъединителей и заземляющих ножей, чьи контакты-повторители (КСА) последовательно задействованы в определенной логике подачи питания на ЭМЗ.
Система управления блокировкой разъединителей на базе ПТК ТМИУС КП обеспечивает сбор информации о состоянии положения выключателей, разъединителей и заземляющих ножей, их логическую обработку на предмет соблюдения необходимых условий для выдачи команды телеуправления на включение цепи питания ± 220 В электромагнитных замков (ЭМЗ) приводов разъединителей и их заземляющих ножей и, собственно, в самой подаче питания на соответствующий электромагнитный замок привода через выходные реле управления.
В схеме программируемой блокировки разъединителей используется минимальное количество контактов КСА, для различных логических схем одни и те же контакты размножаются программно.
Контроль изменения состояния выключателей, разъединителей и заземляющих ножей производится в системе по состоянию одновременно 2-х взаимно-противоположных контакта КСА – нормально-разомкнутому (НР) и нормально-замкнутому (НЗ), что максимально исключает ошибку в оценке состояния положения аппарата, а в случае неопределенного его положения (два контакта КСА находятся одновременно в положении “включено” или “выключено”) на пульте контроля дежурного персонала объекта сигнализируется конкретное место неисправности, что сокращает время на поиск неисправности и производство переключений.
Определение места неисправности контакта диагностируется различными способами:
- Через систему визуализации в виде панельного компьютера или панельного монитора с промышленным компьютером в составе шкафа ОБР
- Через Web интерфейс контроллера со стационарного или переносного АРМ
- Из диспетчерского пункта, т.к. данные о положении коммутационных аппаратов передаются в формате двухпозиционных сигналов по протокола МЭК 60870-5-101/104 или МЭК 61850 MMS
- Через светодиодные индикаторы шкафа, состояние которых зависит от программно-задаваемых сигналов - положение или статус сигналов. Например, исправность всех модулей в составе системы ОБР или наличие хотя бы одного сигнала в промежуточном положении
Внедрение системы управления электромагнитной блокировкой разъединителей с применением программируемых контроллеров позволяет обеспечить:
- Диагностику цепей телесигнализации и телеуправления
- Диагностику работы контроллеров системы
- Дополнительный объем телемеханических параметров положения выключателей, разъединителей и заземляющих ножей в существующую систему телемеханики и АСДУ, на основе информационного кодового взаимодействия по стандартным протоколам МЭК 60870-5-101/104 или МЭК 61850 MMS
- Снижение расхода кабельной продукции в схеме блокировки
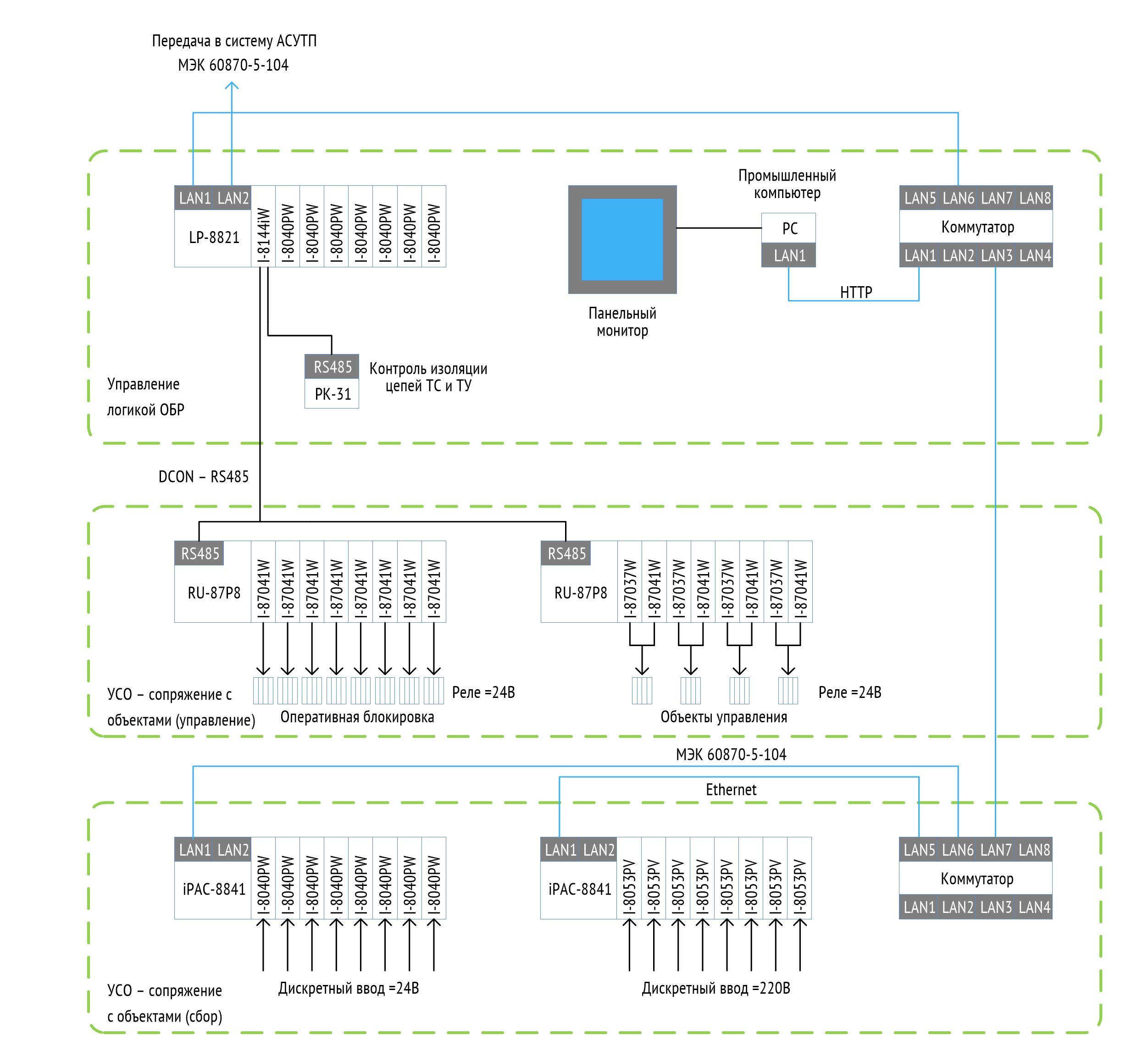
Используемое оборудование
В качестве типового решения системы оперативной блокировки применяются контроллеры ICPDAS LP-8821, используемые как управляющие контроллеры. В качестве контроллеров сбора данных используются ICPDAS iPAC-8841 с модулями ввода I-8040PW (32 канала ввода =24В) или I-8053PV (16 каналов ввода =220В) и корзины расширения RU-87P8 и модулями ввода/вывода I-87040PW (32 канала ввода =24В) и I-87041W (32 канала вывода).
Логика оперативной блокировка параметрируется в текстовом виде с помощью логических формул:
$((ts1_539 and ts1_546) or (!ts2_2 and !ts2_3 and !ts2_5 and !ts2_8))
ts1_539 и т.д. являются символьными идентификаторами сигналов. При необходимости идентификаторам возможно давать более осмысленное наименование:
$((ts_SQ110:deblok) or (!ts_T1G:QSG13 and !ts_T1G:QSG14:1 and !ts_QT1G and !ts_QC1G:QSG1:2 and !ts_TV1G:QSG1:1 and !ts_earth))
из полученных формул построение визуальных логических блоков на схеме происходит автоматически.

Система оперативной блокировки разъединителей в составе АСУТП
Системы телемеханики и оперативной блокировки могут быть выполнены как в виде объединенной системы, в которой телемеханика и оперативная блокировка функционируют на одном контроллере, так и в виде разделенных, взаимодействующих друг с другом систем. Программное обеспечение для телемеханики и оперативной блокировки идентичное, что обеспечивает более гибкое конфигурирование системы.
Основываясь на опыте внедренных проектов, программируемую оперативную блокировку разъединителей можно разделить на два класса: для управляемых моторных приводов и для ручных приводов. Следует учитывать, что моторные привода имеют определенную специфику:
- Для повышения безопасности и дополнительной защиты от ложных/случайных срабатываний сигнал подачи удаленного телеуправления подается совместно с сигналом разрешения от системы оперативной блокировки. При такой реализации удаленного телеуправления в максимальной степени исключается возможность управлять не подготовленным к этому объектом, а также управлять не тем объектом, в случае ложной посылки сигнала ТУ (ошибочная посылка сигнала с уровня диспетчера, либо наличие случайного импульса телеуправления в результате грозовых разрядов, возможных помех, создании ложной цепи при высоковольтных испытаниях и плохой изоляции проводников и др.).
- На время оперирования коммутационным аппаратом оперативная блокировка шунтируется на заданное время и становится не восприимчивой к изменению сигналов логической цепи для данного коммутационного аппарата, т.к. снятие напряжения с реле блокировки во время работы мотора приведет к остановке коммутационного аппарата, что в свою очередь может привести к его повреждению.
- При удаленном телеуправлении от системы АСУТП необходимо тесное взаимодействие оперативной блокировки и телемеханики.
Исходя из опыта реализации проектов по внедрению оперативной блокировки разъединителей, принято использовать три схемы управления разъединителями: дистанционное, местное, ручное телеуправление.
Дистанционное управление
При дистанционном управлении сигналы выдачи ТУ подаются от АРМа дежурного через ОИК/SCADA систему. Перед подачей ТУ система должна получить сигнал готовности блокировки, который информирует, что логическая цепь управления данным приводом собралась, однако сам разрешающий сигнал еще не подается. Если сигнал блокировки разрешает управлять приводом, то команда ТУ с сервера телемеханики подается на контроллер телемеханики, а тот в свою очередь выдает сигнал ТУ на коммутационный аппарат. Контроллер блокировки принимает сигнал удаленного телеуправления и подает напряжение на реле разрешения ТУ привода на время, достаточное для полного переключения коммутационного аппарата. Схема реализации оперативной блокировки для данной схемы показана на рисунке ниже.
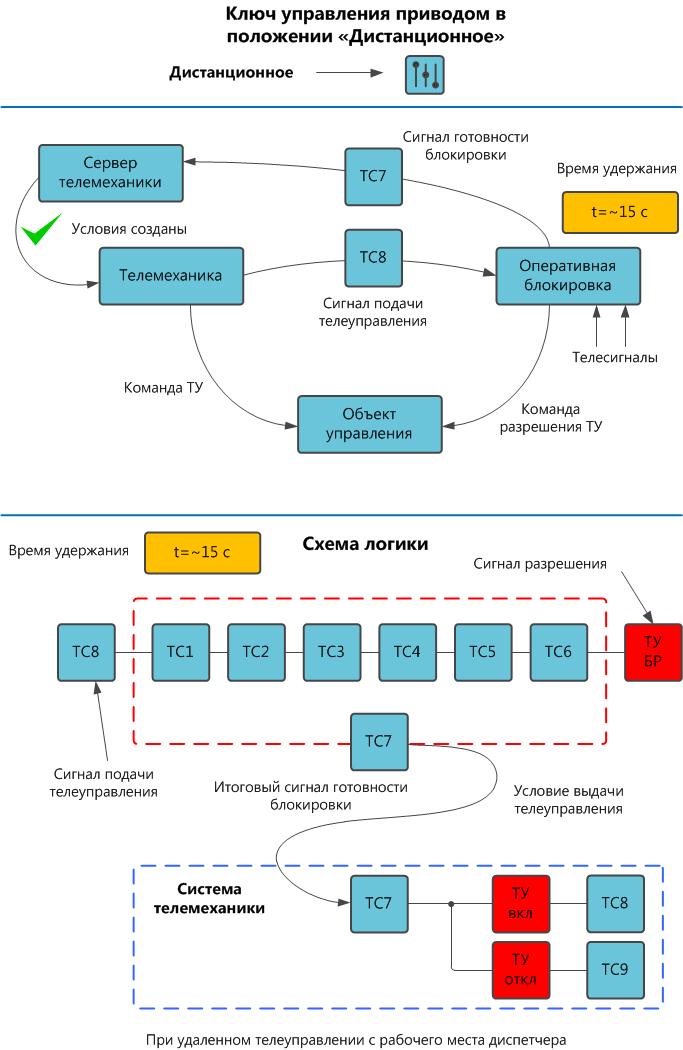
ТС1, ТС2…ТС6 – реальные телесигналы положения коммутационных аппаратов, а также сигнал готовности привода, который включает в себя последовательное соединение ТС положения переключателя в состоянии «Дистанционное», автомат питания двигателя и общий автомат питания коммутационного аппарата.
ТС7 – виртуальный итоговый сигнал готовности блокировки к управлению коммутационным аппаратом. Сигнал используется в SCADA системе перед подачей сигнала телеуправления. ТС7 равен 1, когда будут равны 1 все ТС в цепи блокировки за исключением сигнала ТУ от телемеханики.
ТС8 – флаг состояния исполнения телеуправления, который используется в цепи блокировки и является последним для подачи напряжения на реле блокировки.
Ручное управление
При отсутствии питания оперативной блокировки на подстанции возможно использовать источник бесперебойного питания для запитки реле блокировки приводов. Переключения производятся вручную. Схема реализации оперативной блокировки для данной схемы показана на рисунке ниже. Алгоритм полностью соответствует «традиционной» блокировке, которая используется для ручных приводов и блокировки ячеек 10/6 кВ. Система оперативной блокировки «отличает» разные способы управления сигналом готовности привода.
Местное управление
При аварийных ситуациях для принудительного оперирования приводом с деблокированием используются шкафы управления на ОРУ, которые находятся на безопасном расстоянии от управляемого разъединителя. Ящик телеуправления заранее опечатывается и используется только в крайних случаях. В щкафу привода переключатель «Местное/Дистанционное» переводится в положение «Местное» и тем самым подает питание двигателя на реле блокировки, что приводит к его деблокированию.

Визуализация через Web-интерфейс является неотделимой составной частью исполняемой системы на контроллере под управлением ОС Linux.


При нажатии на коммутационный аппарат появляется всплывающее окно с логическими условиями подачи питания на реле ЭМЗ и подсвечиваются коммутационные аппарататы, участвующие в схеме. Логическая схема строится автоматически, что позволяет исключить ошибки как в случае при ее ручном создании.

Система оперативной блокировки размещается в одном или нескольких шкафах напольного или навесного конструктива.
Типовой размер шкафов 2000х800х600 мм (ВхШхГ) без учета цоколя одностороннего или двухсторннего обслуживания.
В состав шкафа входят:
- контроллер оперативной блокировки
- контроллер сбора дискретных сигналов
- корзина расширения для модулей управления
- реле управления
- модули дискретного ввода\вывода, модуль портов RS485
- сетевое оборудование (коммутаторы)
- блоки питания ~/=220В -> 24В
- конверторы питания ~/=220В -> =220В
- реле контроля изоляции цепей =24/220В
Опционально в шкаф может устаналиваться оборудование:
- ключи деблокирования
- система визуализации на базе промышленного компьютера с ОС Linux и панельного монитора
Шкафы могут поставляться с прописанной на Заводе логикой оперативной блокировки и схемой визуализации.

